
export DISPLAY=:0
ros2 launch gcamp_gazebo maze_world.launch.py // maze 맵 실행
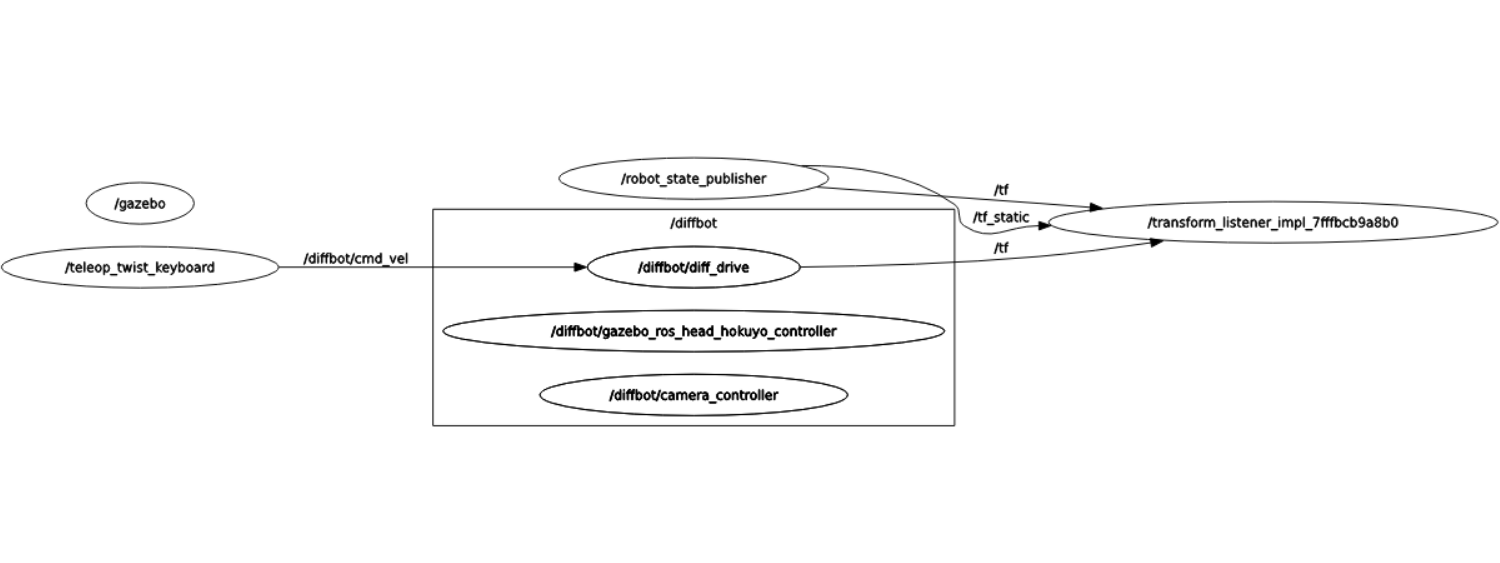
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=/diffbot/cmd_vel // teleoperation
rqt_graph // Rqt_Graph 시각화'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [Gazebo] 2D SLAM by using rviz2 (0) | 2024.12.20 |
|---|---|
| [Gazebo] Obstacle avoidance algorithm (1) | 2024.12.20 |
| [Gazebo] Receiving LiDAR point cloud data (0) | 2024.12.14 |
| [ROS2] Turtlesim 원 그리기 (0) | 2024.12.14 |
| [Gazebo] Ubuntu를 사용하여 vcxsrv 화면에 띄우고 사물 추가해보기 (0) | 2024.12.12 |