
모바일 로봇( Mobile Robot )
어떤 공간 안에서 이동할 수 있는 유형의 로봇. 두 가지로 나눌 수 있음.
- AGV( Automated Guided Vehicle )
- AMR( Autonomous Mobile Robot )
AGV?
로봇이 이동하는 데 가이드를 해줄 수 있는 인프라( 레일, 바닥의 선, 마그네틱 스트립 등 ) 사용하여 미리 결정된 경로를 따라 이동하는 로봇. 이동 경로에 장애물 있으면 운행 불가
AMR?
미리 물리적으로 결정되어 있는 경로를 따라가는 것이 아닌 자율적으로 이동할 수 있는 로봇

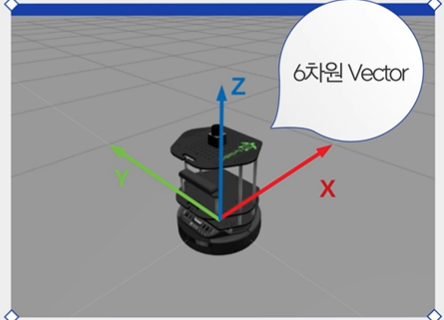
자율 이동 로봇이 해결해야 하는 문제
1. Localization - Where am I?
2. Mapping - What does the environment look like?
3. Path planning - Where should i go?
4. Control - How can it be manipulated?
5. Perception - What kind of object is near me?
자율 이동 로봇 문제 해결을 위한 수학이론
전치행렬 T

대각행렬 Digonal Matrix :
대각 요소 외 나머지 성분이 0

단위 행렬 Idntity Matrix :
대각 요소 1 외 나머지 성분 0

Trace :
행렬의 대각 요소들을 모두 더한 것을 말함

Inverse Matrix 역행렬 :
정사각형 행렬 A를 곱했을 때 단위 행렬이 되는 것
대칭 행렬 :
A 행렬과 A의 전치 행렬과 같은 것
A = A(T)
--

왜 로봇 공학 모바일 로봇에서 확률이 나올까?
자율적으로 이동하는 로봇은 자신의 위치와 주변 환경에 대한 인식 문제를 풀 수 있어야 자율적으로 이동하는 로봇 생산 가능. 정확한 센서에도 noise, 오차는 필연적으로 발생. 그러므로 확률을 도입하여 문제를 해결함.
--
누적분포함수, Cumulative Distribution Function CDF

--
SLAM 문제 적용 예시
> 모든 SLAM 문제는 '확률'로 접근 : 모든 로봇 모션과 관측에는 불확실성이 따르기 때문
> SLAM에서는 Belief 라는 단어 사용 : 신뢰도를 '확률'로 표현
> 어떠한 센서도 100% 정확할 수 없기 때문에 이러한 확률 분포로 나타내는 것

'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [ROS2] Mobile-Robot Navigation and TF (0) | 2025.02.17 |
|---|---|
| [ROS2] Kinematic (0) | 2025.02.16 |
| [ROS2] Practice of the Node, Topic, Service( client, server ) & etc (0) | 2024.12.25 |
| [ROS2] Concept of the Node, Topic, Service( client, server ) (1) | 2024.12.24 |
| [Gazebo] 2D SLAM by using rviz2 (0) | 2024.12.20 |