
모바일 로봇?
어딘가에 종속되지 않고 자신의 위치를 게속 옮길 수 있는 로봇
고정식 로봇?
로봇 팔, 로봇 얼굴, 산업용 로봇 등 산업용 로봇을 말함. 어딘가에 종속되어 움직임의 영역이 국한되는 로봇
--
움직이는 방식에 따른 구분 Holonomic Vs Nonholonomic
> Holonomic Robot : 제어 가능한 자유도 = 총자유도 일때
즉각적이고 자유로운 움직임을 할 수 있는 로봇
> Nonholonomic Robot : 제어 가능한 자유도 < 총자유도 일때, 자동차를 예로 들 수 있음 자동차는 가속도와 브레이크, 그리고 조향각만으로 제어되므로, 조향에 제한이 존재하므로 조향의 자유도에 제한 있음.
특정한 방향에서만 움직일 수 있는 로봇을 의미. 주로 정해진 경로나 방향으로의 이동이 주된 목적이다.
--
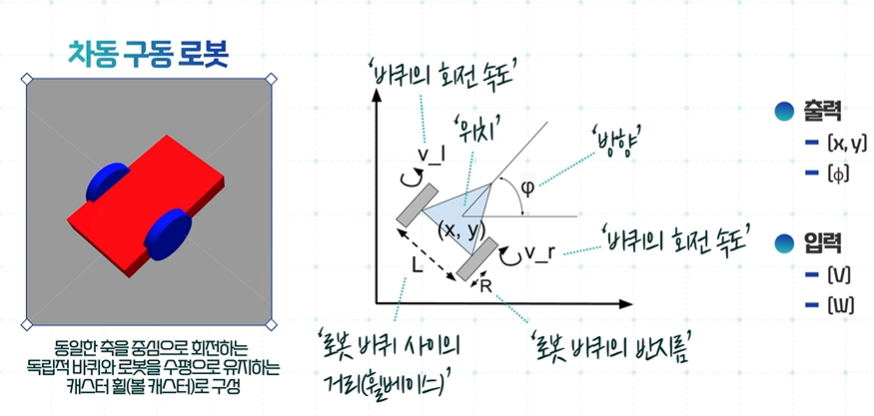
차동( two-wheel differential ) 구동 로봇

--
피드백 제어 :
지속적인 오류를 감지, 보정하여 목표로하는 지점까지의 오류 누적 없는 방법
'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [ROS2] URDF (0) | 2025.02.17 |
|---|---|
| [ROS2] Mobile-Robot Navigation and TF (0) | 2025.02.17 |
| [ROS2] Mobile robot, Matrixes (0) | 2025.02.16 |
| [ROS2] Practice of the Node, Topic, Service( client, server ) & etc (0) | 2024.12.25 |
| [ROS2] Concept of the Node, Topic, Service( client, server ) (1) | 2024.12.24 |