
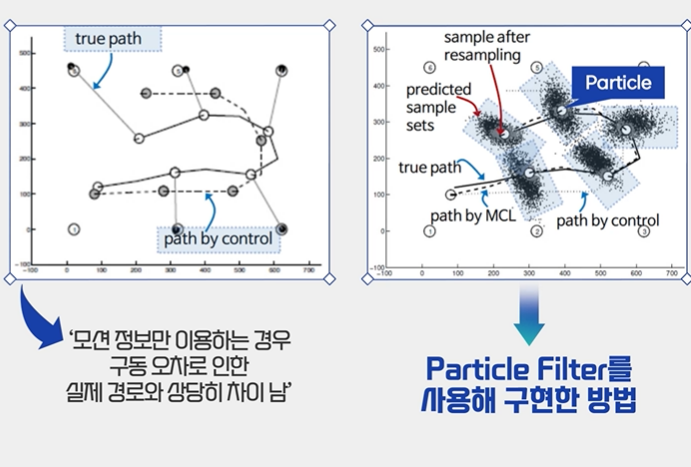
Particl Filter
- 로컬라이제이션 기법에서 가장 많이 사용되고 있음





--
Cartographer
- 특별한 로봇 플랫폼과 센서 구성에 제한없이 2D 및 3D로 실시간 동시 위치 파악 및 매핑하는 것
- Google이 개발하여 오픈소스로 공개한 SLAM 시스템
- ROS 패키지와 연동하게 되어 있음
'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [ROS2] RRT, Potential Field (0) | 2025.02.18 |
|---|---|
| [ROS2] Path-planning (0) | 2025.02.18 |
| [ROS2] Bayes, Kalman, Particle Filter (0) | 2025.02.18 |
| [ROS2] URDF (0) | 2025.02.17 |
| [ROS2] Mobile-Robot Navigation and TF (0) | 2025.02.17 |