
Filter :
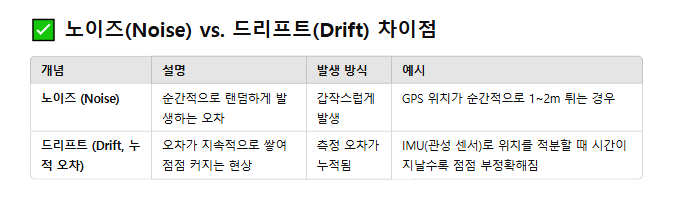
입력되는 값들에서 노이즈나 잡음, 또는 불확실성을 제거하여 보다 정확한 출력 추정치를 얻는 것
센서를 이용하여 예측, 보정(correction)이 지속적으로 이루어짐
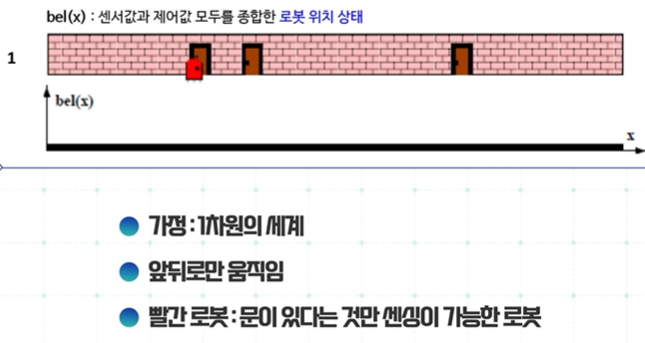
Bayes Filter :
과거값을 사용하여 보다 정확한 추정을 제공하는 추정 알고리즘
베이즈 필터의 역할 :
- 이전 상태 ut-1과 현재의 제어 명령값 ut를 이용하여 현재 상태 xt를 예측하는 역할
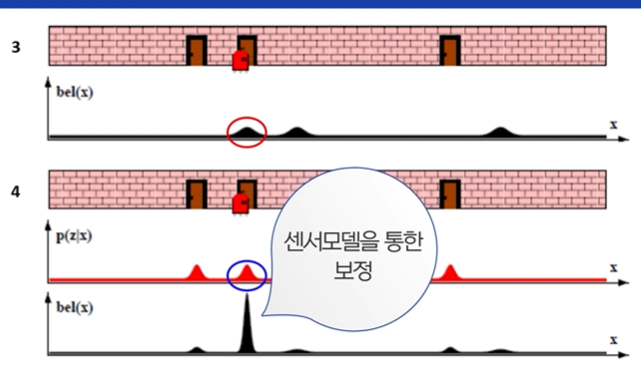
- 예측한 현재 상태 xt를 알고 있을 때 센서값을 확률을 기반으로 보정하는 역할
- 베이즈 필터의 단점 :
Prediction 할 때 사용되는 적분 연산에서 문제 발생
- 해결방법
01. 적분이 되는 식만 사용하는 방법( 노이즈가 가우스의 확률 분포를 따른다고 가정이 전제조건 )
- 노이즈가 가우스 정규분포를 따른다고 가정 > Kalman filter
02. Monte Carlo Integration 방법
- 랜덤 샘플링을 통하여 근사화 > Particle filter
Kalman Filter :
- 모든 측정에서 노이즈 감소
- 시스템의 상태와 그 분산값을 이용해서 그 시스템의 불확실성에 대한 최적의 추정을 하는 것
- 재귀적인 구조를 가지고 Iterative하게 진행되기 때문에 많은 양의 계산도 필요 없는 메모리나 연산량 면에서 유리한 정점이 있는 알고리즘
Markov Assumption, 마코프 가정 :
현재 상태를 알면 과거와 미래의 데이터는 서로 관련이 없음 - '독립'

'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [ROS2] Path-planning (0) | 2025.02.18 |
|---|---|
| [ROS2] Particle Filter (0) | 2025.02.18 |
| [ROS2] URDF (0) | 2025.02.17 |
| [ROS2] Mobile-Robot Navigation and TF (0) | 2025.02.17 |
| [ROS2] Kinematic (0) | 2025.02.16 |