
Path-planning
- 결정론적 접근
- 경로 계획 중 환경의 변화나 불확실성을 고려하지 않은 경우에 효과적
- 주어지는 환경이 유사할 경우 동일한 경로 계획 결과 도출
- Dijkstra, A*
- 확률론적 접근
- 환경의 불확실성, 동적인 요소들을 고려하여 로봇의 경로를 계획하는 데에 유용
- 무작위성을 활용하여 다양한 환경에서 효과적으로 빠르게 경로를 찾을 수 있음
- RRT, Potential Field
--
휴리스틱( Heuristic ) :
문제를 해결할 때, 경험이나 직관을 바탕으로 문제를 해결하는 방법,
완전한 해결책을 보장하진 않지만 빠르게 방법을 제시할 때 사용된다.
Ex01.퍼즐을 맞출 때, 모든 조각을 하나하나 다 맞추는 것보다, 색이나 모양이 비슷한 조각을 먼저 맞춰보는 것.
Ex02.길 찾기, 지도에서 직선으로 가는 길이 가장 빠를 것이라고 추정하는 것
휴리스틱의 장점은 문제를 빠르게 해결할 수 있도록 도와준다.
복잡한 문제를 단순화
경험이나 직관을 바탕으로 가장 유용한 방법을 선택하는 기법
*유클리드 거리 = 점과 점사이의 거리 공식
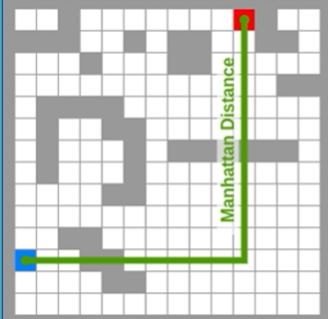
*맨허튼 거리 = 직각 거리 계산
Ex. 좌표(1,0)과(6,1) 사이의 맨허튼 거리 : 6
dijkstra

모든 노드를 방문하므로 불필요하고 시간이 많이 걸림
휴리스틱 사용x
간단하지만 효율적이지 x
A*
휴리스틱을 활용해서 최단경로를 찾는 유연한 방법 제공
높은 메모리량 요구

'**Autonomous driving tech. > *ROS2' 카테고리의 다른 글
| [ROS2] Navigation Stack, Manipulation, Motion-planning (0) | 2025.02.19 |
|---|---|
| [ROS2] RRT, Potential Field (0) | 2025.02.18 |
| [ROS2] Particle Filter (0) | 2025.02.18 |
| [ROS2] Bayes, Kalman, Particle Filter (0) | 2025.02.18 |
| [ROS2] URDF (0) | 2025.02.17 |