
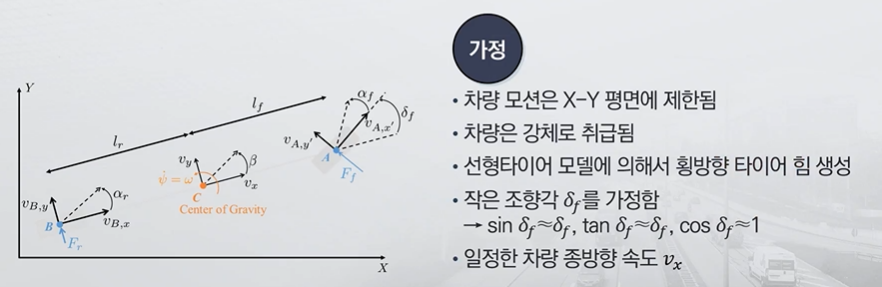
- 기하학적 자전거 모델은 차량 속도가 낮은 경우를 제외하고 대부분 차량 거동에서 유효 X
- 코너링시 타이어는 노면과의 상호 작용에 의해서 미끄럼이 발생하고, 마찰력에 의해서 선회를 함
- 운동의 원인을, 즉 타이어 힘/모멘트, 고려하는 동역학 모델 필요
- 타이어의 힘/모멘트를 표현하는 다양한 타이어 모델이 존재
- 차량 선회 시 차속이 빠르면, 슬립 각이 발생하여 타이어 힘/모멘트가 생김
>> 기구학적 자전거 모델은 더 이상 유효하지 않음
- 힘/모멘트를 고려하는 동역학적 자전거 모델이 필요함
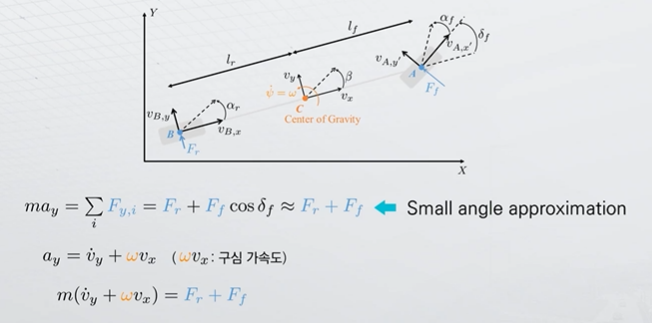
횡방향 다이나믹스 ( 힘 평형 )
요 다이나믹스 ( 모멘트 평형 )

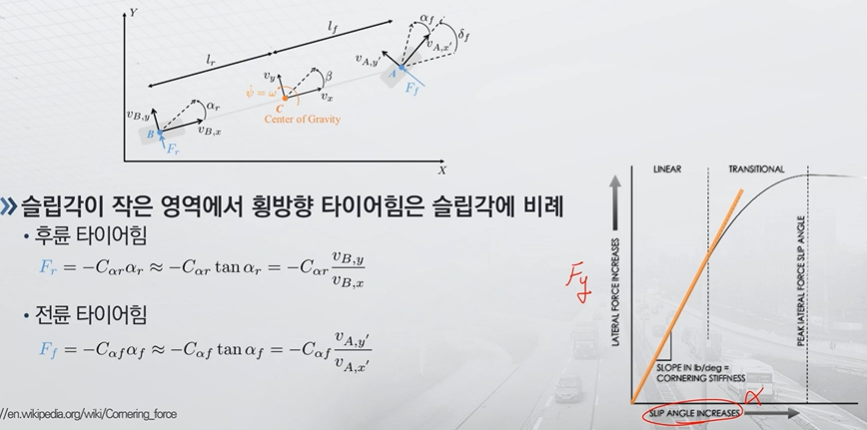
선형 타이어 모델
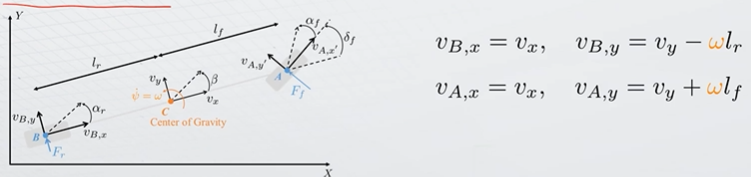
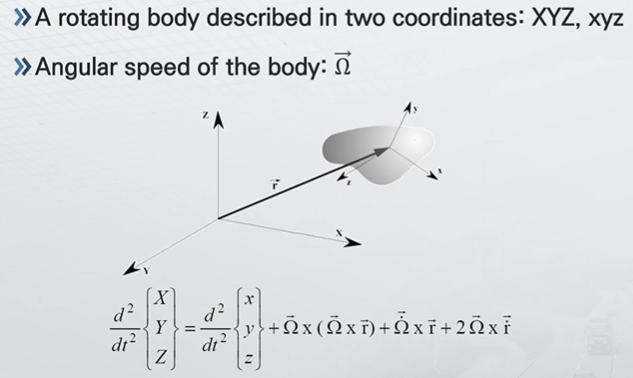
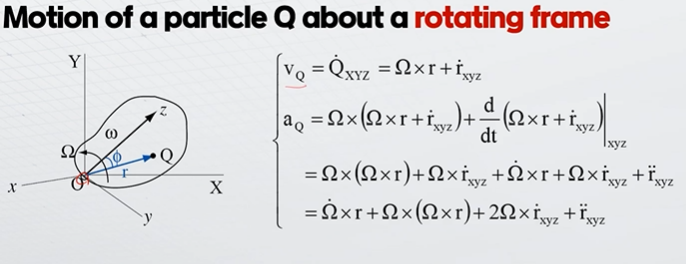
강체( 차량 )의 고정된 두 점의 속도 관계
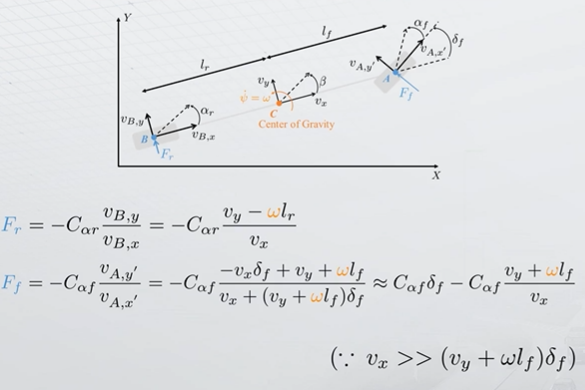
전/후륜 횡 방향 타이어 힘( 선형 타이어 모델 )
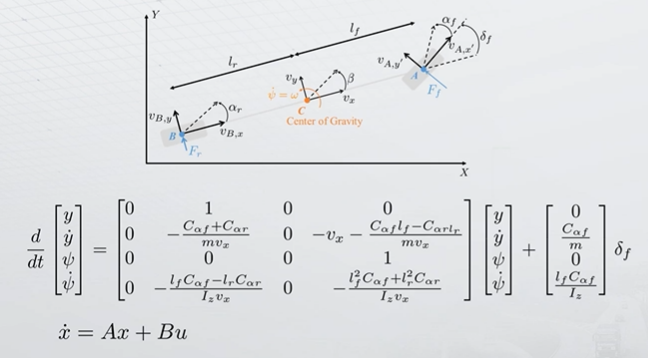
상태공간 방정식
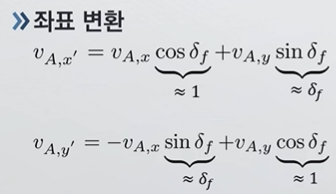
극 좌표계

정상 상태 선회시( Steady State Cornering ) 조향각도
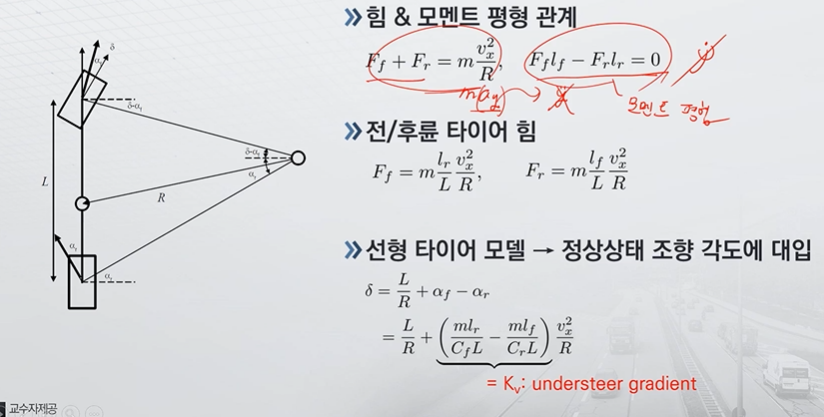
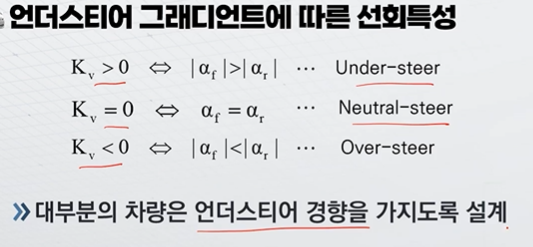
언더스티어 그래디언트( Unedersteer Gradient )


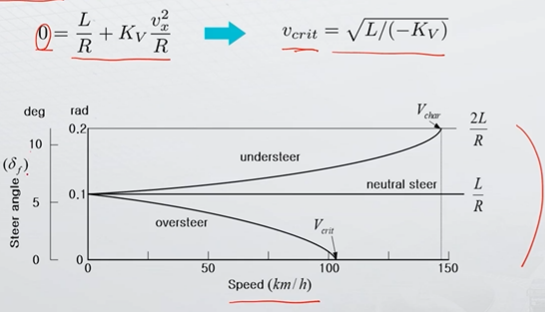
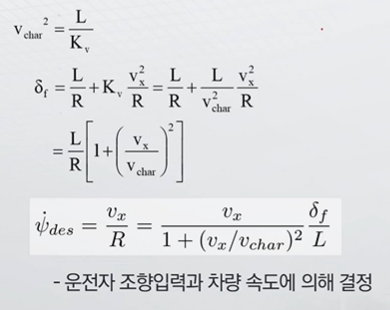
특정 속도( Characteristic Speed )
- 애커만 조향각의 2배의 값의 조향각도로 선회 시 필요한 차량 속도 ( Understeer )

임계 속도 ( Critical Speed )
- 조향 각도가 0도일 때 차량 속도( Oversteer )
정상상태 요레이트
- 특정속도로 표현 가능, 차량 횡방향 거동 불안정시 레퍼런스 요레이트로 쓰인다.
*요레이트 : 차량이 수평면에서 얼마나 빠르게 회전하는지를 나타내는 값
These materials are derived from the theory and practice of autonomous driving control developed by Professor Han Gyeong-suk from KNU.
'**Autonomous driving tech. > *Learning' 카테고리의 다른 글
| [자율주행제어 이론 및 실습] Learning 02 ( 제어 강건성, Stanley algorithm, 에커만, differential 조향 ) (0) | 2025.01.11 |
|---|---|
| [자율주행제어 이론 및 실습] Learning 01 ( ESC제어, 유압/전동식 스티어링 ) (1) | 2025.01.08 |
| [자율주행제어 이론 및 실습] 기구학적 횡방향 동역학 모델 (1) | 2025.01.02 |
| [자율주행제어 이론 및 실습] 파워트레인 동역학 모델링 (1) | 2025.01.02 |
| [자율주행제어 이론 및 실습] 차량 종방향 동역학 모델링 (0) | 2025.01.02 |