
차선 유지 보조 시스템의 요구조건
- 제어 강건성 요구 조건으로 노면 변화에 대비해야 한다.
- 액츄에이터 요구 조건은 최대한 넓은 대역폭을 필요로 한다.
*댐핑 효과 : 진동이나 충격이 발생할 때 그 에너지를 흡수하고 감소시키는 과정을 의미
*제어 강건성( control robustness ) : 시스템이 외부의 변화나 불확실성에 대해 안정적으로 동작할 수 있는 능력을 말한다.
Stanley Methond
Stanley Method는 자율주행 차량 및 로봇에서 사용하는 경로 추종( control ) 알고리즘 중 하나로,
이 방법은 차량이 주어진 경로를 따라 안정적으로 주행할 수 있도록 도와준다.
특히 곡선 주행 시 효과적이다.
- 차량 속도를 고려
- 차량 앞 바퀴 차축을 기준으로 경로 추종을 수행
- 경로 오차에 비례한 조향각을 부여
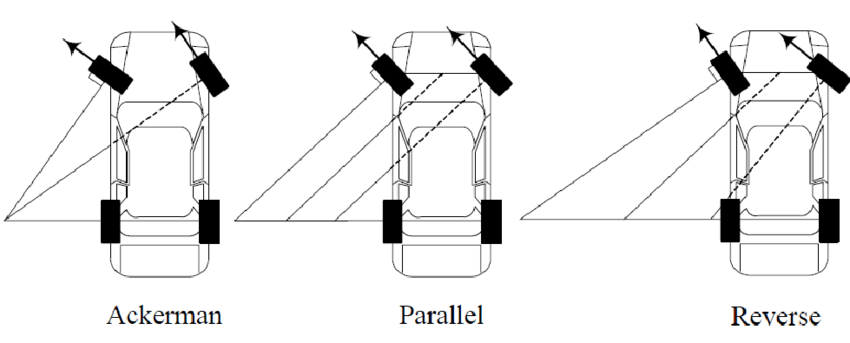
에커만 조향( Eckermann Steering ) & 디퍼렌셜 조향( Differential Steering )
에커만 조향 시스템은 앞 바퀴가 회전하여 방향을 전환하는 방식이다. 이 설계는 차체가 회전 중심을 기준으로 회전하도록 하여, 바퀴가 같은 원호를 따라 움직인다.
- 자동차와 같은 4륜 또는 2륜 차량에 사용
디퍼렌셜 조향 시스템은 두 개의 바퀴의 회전 속도를 다르게 하여 방향을 전환하는 방식이다. 한쪽 바퀴의 속도를 높이면 그 쪽으로 회전하게 된다.
- 로봇, 전투 차량 등에서 사용
These materials are derived from the theory and practice of autonomous driving control developed by Professor Han Gyeong-suk from KNU.
'**Autonomous driving tech. > *Learning' 카테고리의 다른 글
| [자율주행제어 이론 및 실습] Learning 04 ( Real-time Testing, VILS, (0) | 2025.01.17 |
|---|---|
| [자율주행제어 이론 및 실습] Learning 03 ( Model Based Design, MBD, Hardware-In-the-Loop-Simulation, HILS, SILS, ECU) (0) | 2025.01.16 |
| [자율주행제어 이론 및 실습] Learning 01 ( ESC제어, 유압/전동식 스티어링 ) (0) | 2025.01.08 |
| [자율주행제어 이론 및 실습] 동역학적 횡방향 자전거 모델 (0) | 2025.01.02 |
| [자율주행제어 이론 및 실습] 기구학적 횡방향 동역학 모델 (0) | 2025.01.02 |