
01.
State feedback with Feedforward Term 제어기
피드포워드 항이 포함된 State Feedback 제어기
자, 자동차를 운전할 때를 생각
우리는 목적지까지 잘 가기 위해 핸들을 돌리고, 가속 페달을 밟고, 브레이크도 밟아.
그런데
만약에 언덕이 있다면?
- 그냥 속도만 보고 운전하면 언덕에서 속도가 느려짐
- 그래서 미리 가속 페달을 더 밟아서 속도를 유지해야 함
이게 바로 피드포워드(Feedforward) 제어다.
즉, 미래의 변화(언덕)를 예측하고 미리 반응하는 것
정리
✅ State Feedback 제어기 → "현재 상태를 보고 조절"
✅ 피드포워드 항 추가 → "앞으로 변할 걸 미리 알고 조절!"
즉, State Feedback + 피드포워드를 쓰면
반응이 더 빠르고 부드러운 제어가 가능하다.
--
a. 피드포워드 항은 헤딩각도 정상상태 오차를 없앨 수 있다.
헤딩각도( Heading Angle )이란 차가 바라보는 방향을 의미한다. 그런데 차가 도로에서 미끄러지면( 횡미끌림 발생 ), 피드 포워드 제어만으로는 방향을 완벽하게 맞출 수 없다.
예를 들어 눈길에서 차를 운전할 때, 미리 핸들을 돌린다고 해도 차가 미끄러지면 예상한 방향과 다르게 갈 수 있다.
이때는 지금 상태를 보고 헤딩각도( Heading Angle )을 계속 조절해야 한다.
따라서 피드 포워드 항만으로 헤딩각도( Heading Angle )를 정확하게 맞출 수 없다.
"헤딩각도 정상상태 오차를 없앨 수 있다"라는 말은 틀린 말이다. 🚫
- 맞는 선지
> 피드포워드 항은 희망 요레이트를 보상하기 위해 추가된 항이다
💡 피드포워드 항(Feedforward Term)은 차량이 원하는 주행 경로를 미리 예측하고 보상하는 역할을 한다.
도로 곡률(κ)에 따라 희망 요레이트를 보상하는 기능이 있다.
- 요레이트(r˙\dot{r})는 차량이 회전하는 속도를 의미함
- 차가 곡선을 따라가려면 적절한 요레이트가 필요함
즉, 피드포워드 항이 희망 요레이트를 반영함으로써, 차량이 원하는 궤적을 따라가도록 도와준다.
+ Proportional Integral Derivative 제어기를 공부 해야하는 이유
Q. 피드 포워드 제어는 차량이 곡선로에 진입을 하면 그 다음부터는 제어가 어렵지?
A. 맞습니다. 피드포워드(Feedforward) 제어는 미리 계산된 모델을 기반으로 입력을 조정하는 방식이라서, 차량이 곡선로에 진입한 이후에는 외란(예: 노면 변화, 타이어 마찰력 변화)에 대한 대응이 어렵습니다.
곡선로에서는 피드백(Feedback) 제어가 필요합니다. 센서 데이터를 기반으로 실시간으로 조향각을 조정하는 PID 제어나 LQR 같은 기법이 사용됩니다.
02.
📌 Constant Time Gap 전략이란?
*ACC(Adaptive Cruise Control, 적응형 크루즈 컨트롤) 은 앞차와의 거리를 적절히 유지하면서 속도를 조절하는 시스템임.
이때, 거리 유지 방식에는 두 가지 전략이 있음.
✔ 1. Constant Spacing Policy (고정 거리 유지 전략)
- 앞차와 일정한 거리(DD)를 유지하는 방식
- 문제점:
- 앞차가 갑자기 감속하면 충돌 위험
- 고속도로 주행에서 비효율적 (차량 흐름이 원활하지 않음)
- ACC 안정성 요구 조건을 만족하지 못함 ❌
✔ 2. Constant Time Gap Strategy(고정 시간 간격 유지 전략)
- 앞차와의 거리를 "시간 간격" 기준으로 유지하는 방식
- 🚗🕒 시간 간격(희망 거리) = 현재 속도 × 일정한 시간 값
- 즉, 희망 거리에 "상대속도"를 반영하여 앞차가 빠르면 더 멀리, 느리면 가까이 따라감
- ACC 안정성 요구 조건을 만족함! ✅
📌 왜 Constant Time Gap Strategy가 더 적합할까?
✔ 앞차가 감속하면 자연스럽게 감속하여 충돌 방지
✔ 고속도로에서 차량 흐름을 원활하게 유지
✔ 안정적인 주행 환경 제공
✅ 결론: Constant Time Gap 전략이 희망 거리에 상대속도를 포함하여 안정성을 보장한다!
03.
주행환경과 제어기가 분리되어 실행되지 않고, 서로 상호작용하며 실행됨.
정답 b. 비선형적 부품들 ( 엔진, 서스펜션, 배터리, 조향 장치 )들은 실제 HW를 사용하여 주행 환경과 연동한다.
--
dSPACE는 제어 시스템 개발을 위한 '실험실'
dSPACE의 역할:
- 실제 부품을 테스트하기 전에 제어 알고리즘(차량의 속도나 방향을 제어하는 프로그램 등)을 먼저 가상 환경에서 실험하고 검증할 수 있어요.
- 그 후, 실제 하드웨어(차량의 부품들)와 연결해서 테스트하고, 실차 환경에서 제어 시스템이 제대로 작동하는지 확인합니다.
즉, dSPACE는 컴퓨터와 실차 부품을 연결해, 실제 차량에서 일어날 수 있는 상황을 가상으로 만들고, 제어 시스템이 올바르게 작동하는지 확인하는 시스템입니다.
04.
V 사이클 개발 프로세스
컴퓨터나 자동차 같은 기계를 만들 때, 어떤 것을 만들기 전에 설계하고 만들고 나서 테스트하는 순서가 있다. 그 순서를 그림으로 그리면 "V" 모양이 된다.
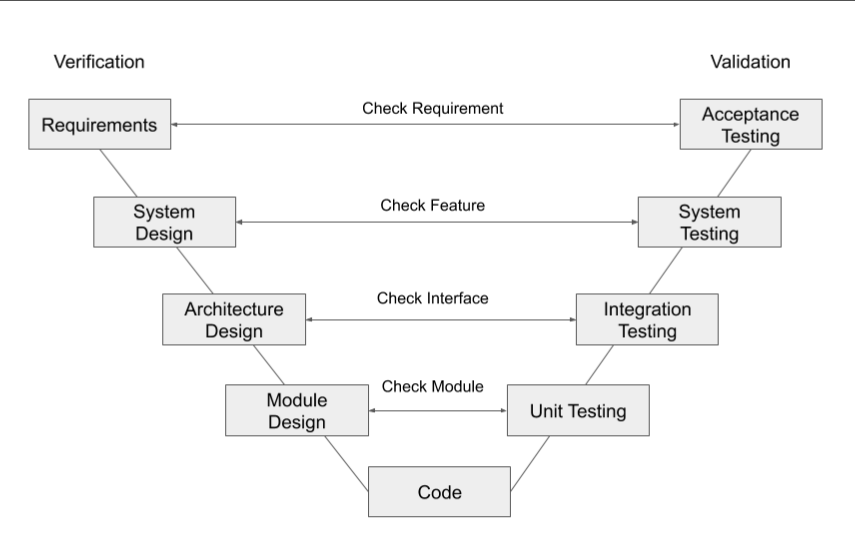
정답 a. "Simulation-in-the-Loop"라는 말은 V 사이클에서 공식적으로 쓰는 용어가 아니다. V 사이클에서는 MIL, SIL, HIL, PIL 이런 말들을 쓰고, "Simulation-in-the-Loop"는 존재하지 않는다.
These materials are derived from the theory and practice of autonomous driving control developed by Professor Han Gyeong-suk from KNU.
'**Autonomous driving tech. > *Learning' 카테고리의 다른 글
| 자율주행과 인공지능 02 (0) | 2025.02.27 |
|---|---|
| 자율주행과 인공지능 01 (0) | 2025.02.26 |
| [자율주행제어 이론 및 실습] Learning 06 Feedback & Feedforward control (0) | 2025.02.01 |
| [자율주행제어 이론 및 실습] Learning 05 AFS, ABS, ACC (0) | 2025.01.29 |
| [자율주행제어 이론 및 실습] Learning 04 ( Real-time Testing, VILS, (0) | 2025.01.17 |