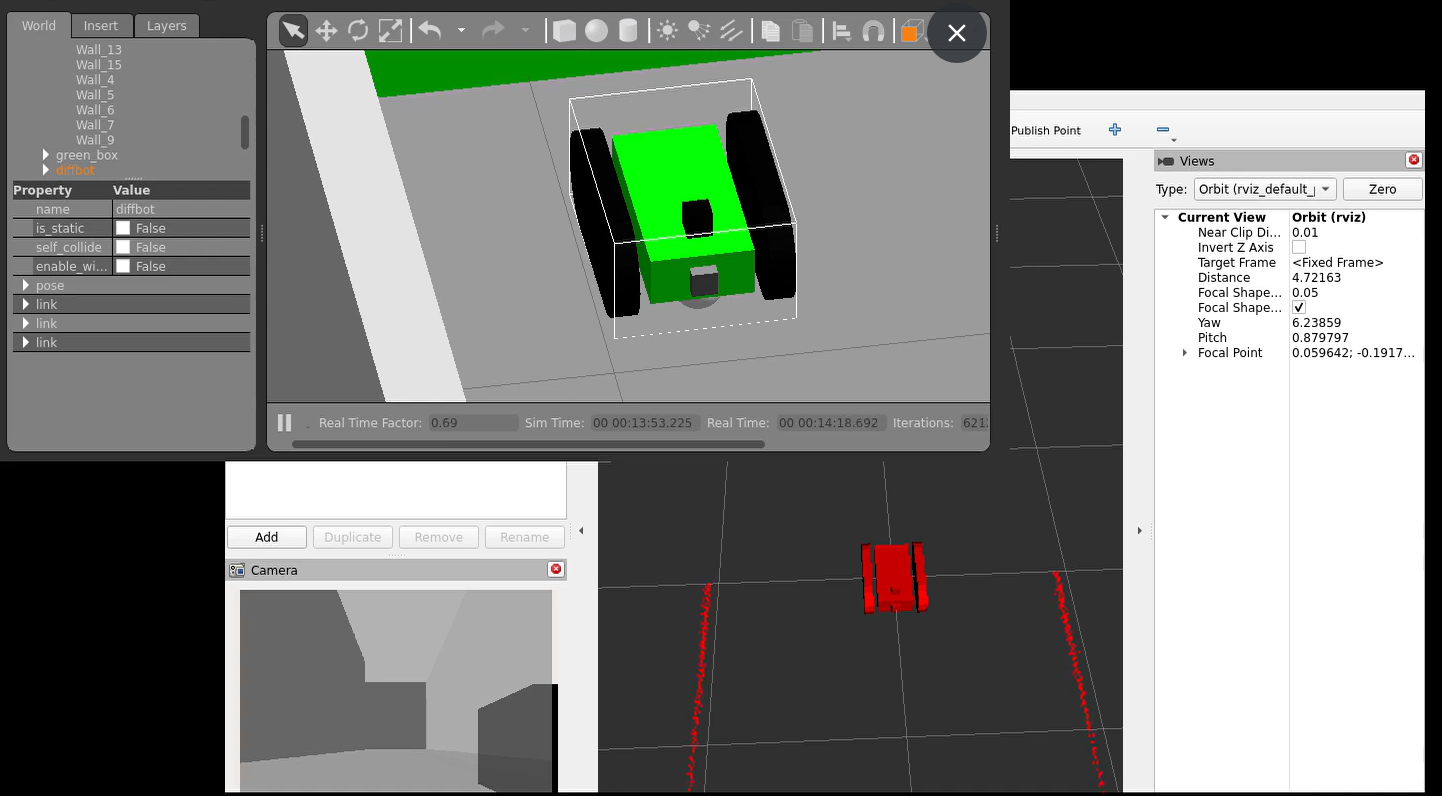
[Gazebo] Teleoperation practice export DISPLAY=:0ros2 launch gcamp_gazebo maze_world.launch.py // maze 맵 실행 ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=/diffbot/cmd_vel // teleoperation rqt_graph // Rqt_Graph 시각화 **Autonomous driving tech./*ROS2 2024.12.15